// EXPLORATORY DATA ANALYSIS
Analisis Dataset
Eksplorasi mendalam terhadap 1.892 citra aerial (1.444 train + 448 val) dengan 10 kelas segmentasi.
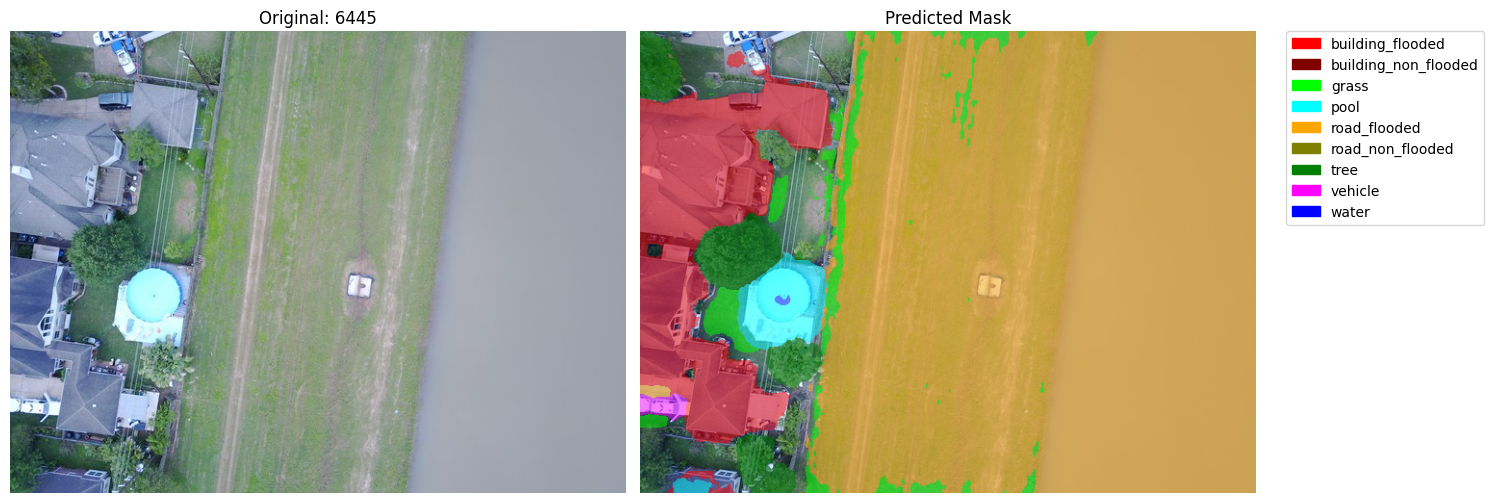
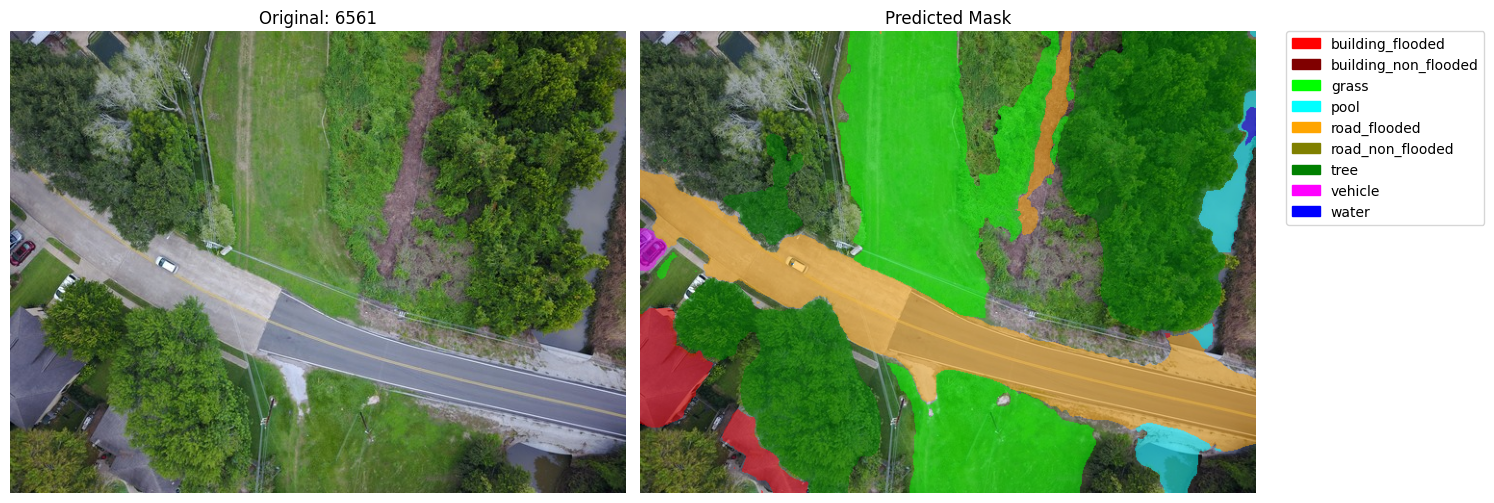
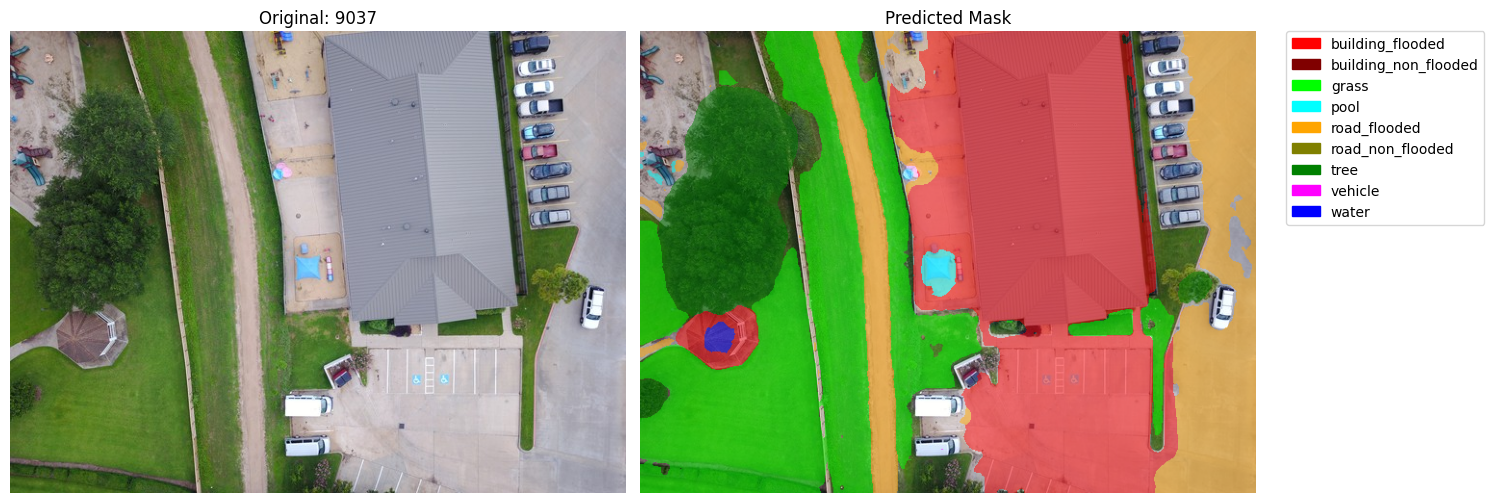
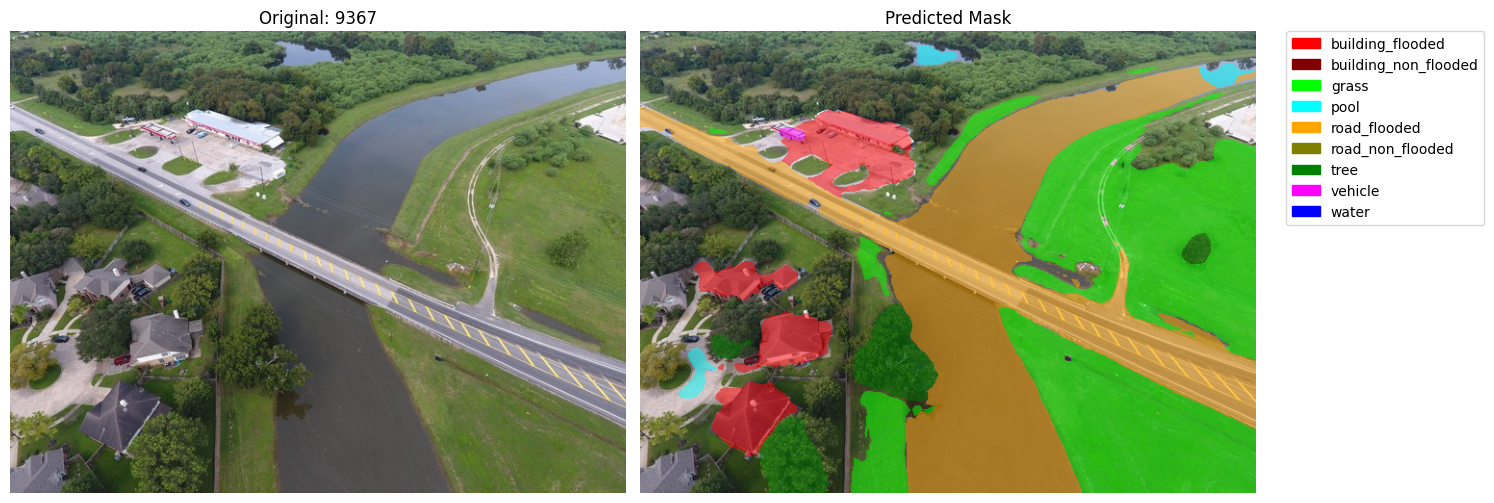
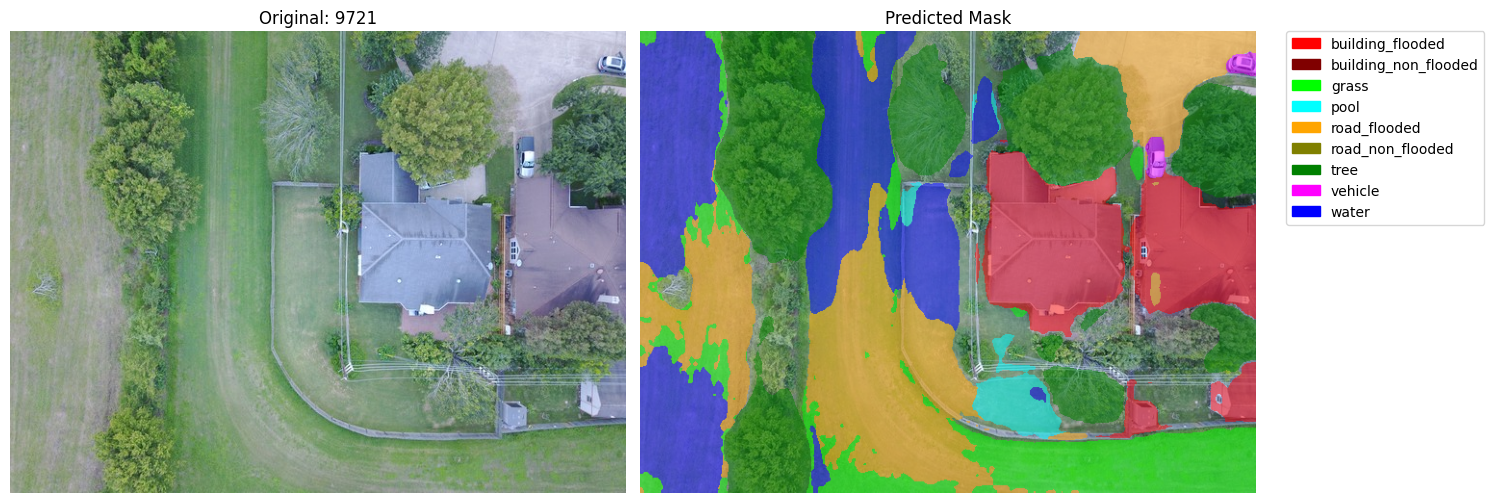
Sampel Gambar Dataset






Kelas grass dan tree mendominasi lebih dari 50% total piksel, sementara kelas vehicle dan water sangat langka (<2%). Ketimpangan ini memerlukan class weighting khusus.
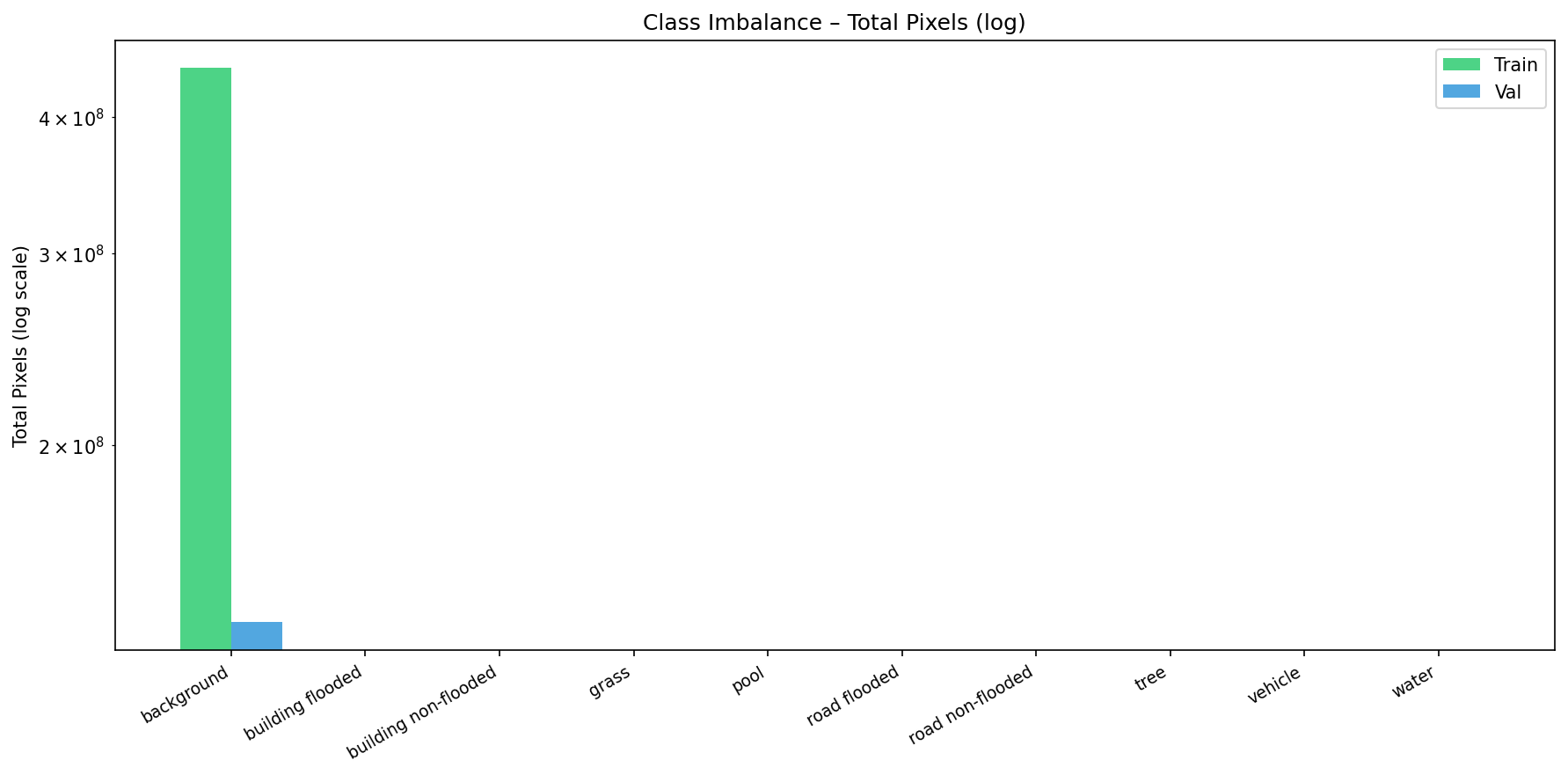
Visualisasi skala logaritmik memperlihatkan perbedaan jumlah piksel antar kelas yang sangat ekstrem — hingga 100x lipat antara kelas dominan dan minoritas.
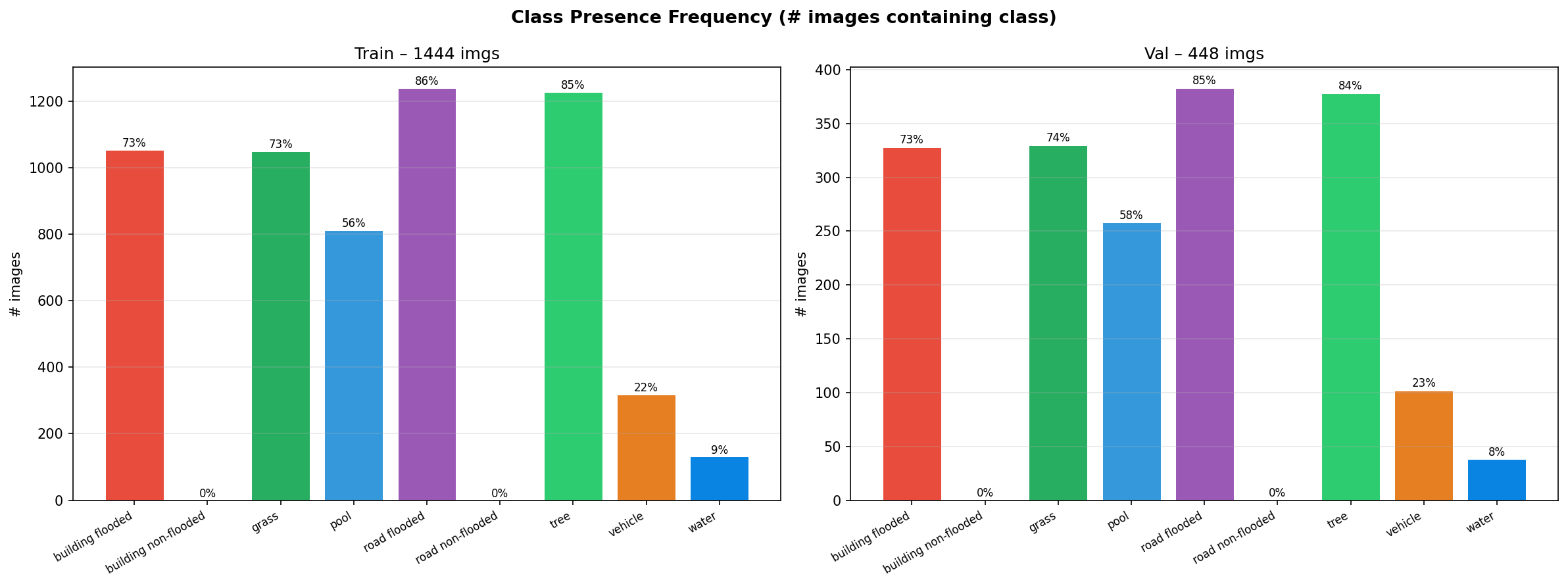
Frekuensi kemunculan kelas di seluruh gambar. Kelas building_non_flooded dan road_non_flooded hampir tidak muncul sama sekali di data.
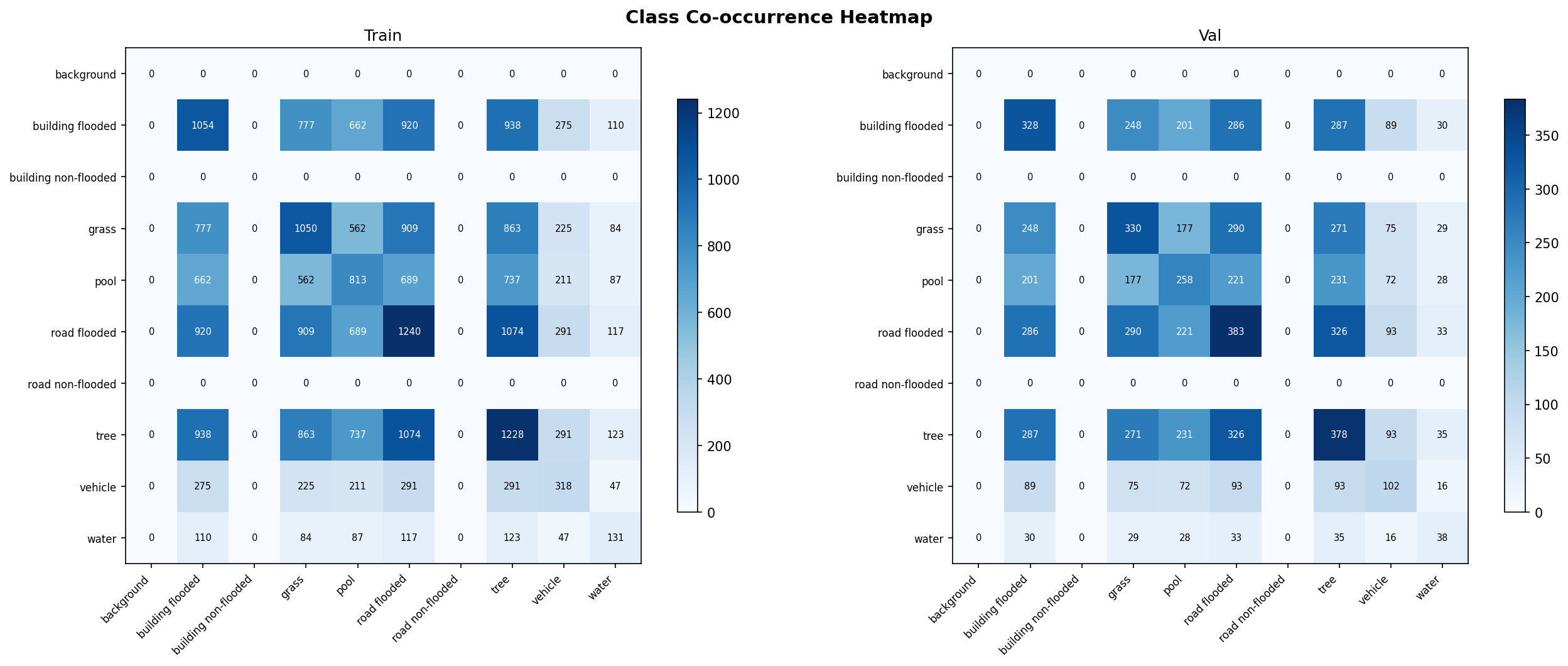
Heatmap co-occurrence menunjukkan kelas mana yang sering muncul bersamaan dalam satu gambar. Tree + Grass adalah pasangan paling umum.
Proporsi piksel per kelas dalam bentuk pie chart. Sangat jelas terlihat dominasi kelas vegetasi (grass + tree).
Boxplot menunjukkan variasi cakupan (coverage) setiap kelas per gambar. Kelas langka memiliki median mendekati nol dengan outlier tinggi.
Perbandingan distribusi piksel antara data Train dan Validasi. Distribusi yang mirip memastikan validasi yang representatif.
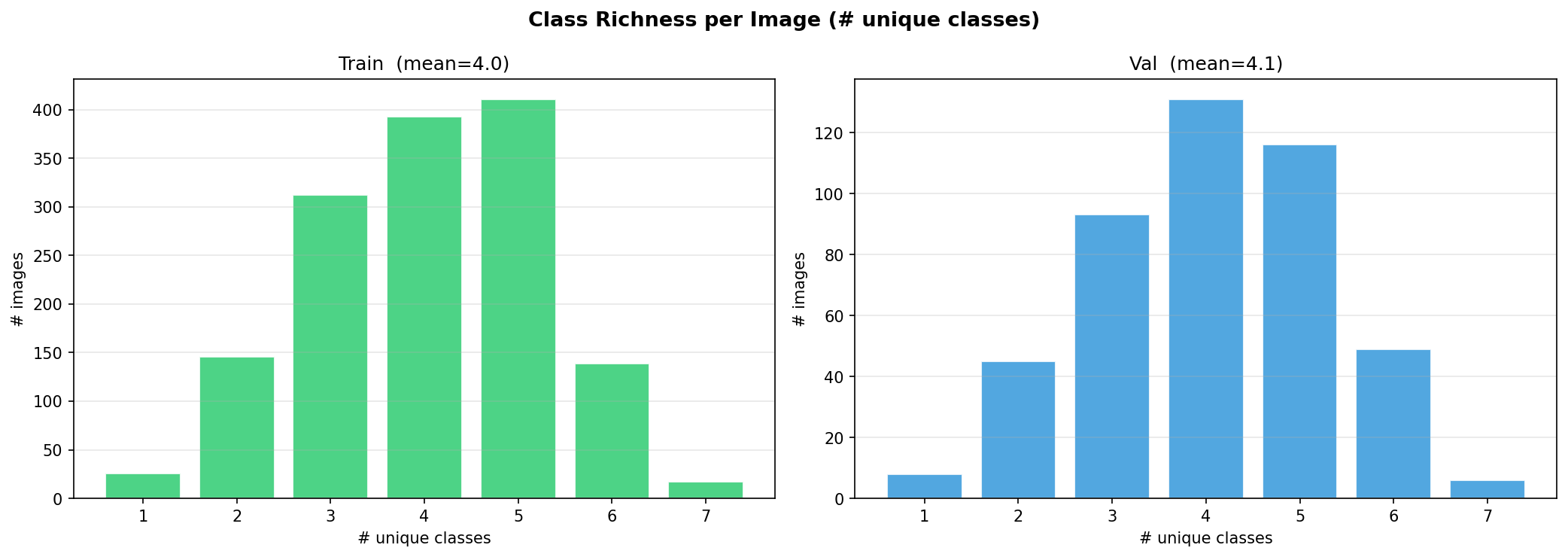
Histogram jumlah kelas unik per gambar. Rata-rata setiap gambar mengandung 3-4 kelas berbeda.
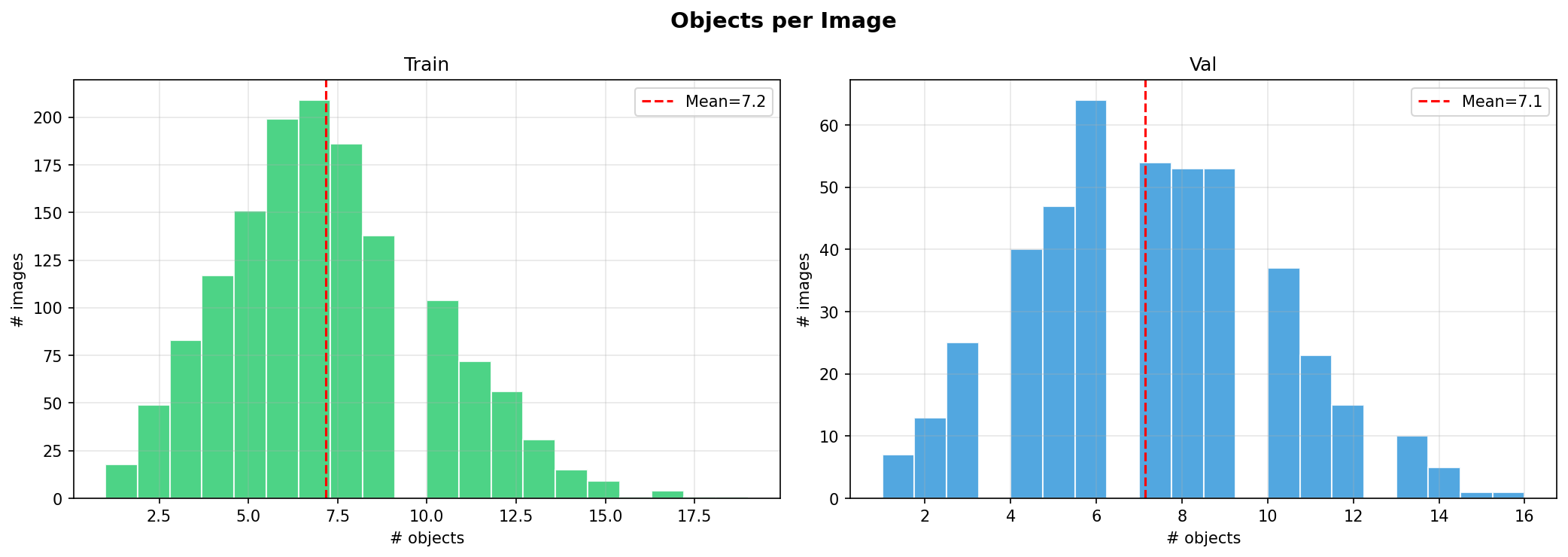
Distribusi jumlah objek per gambar. Mayoritas gambar memiliki 5-15 objek anotasi individual.
Scatter plot dimensi gambar. Sebagian besar gambar berukuran seragam (640×480 piksel).
Heatmap konsentrasi ukuran gambar. Mayoritas terkonsentrasi di satu titik (resolusi seragam).